◆ CASE STUDY · 02 — IITB × GOV. OF INDIA
Vision-guided field robot.
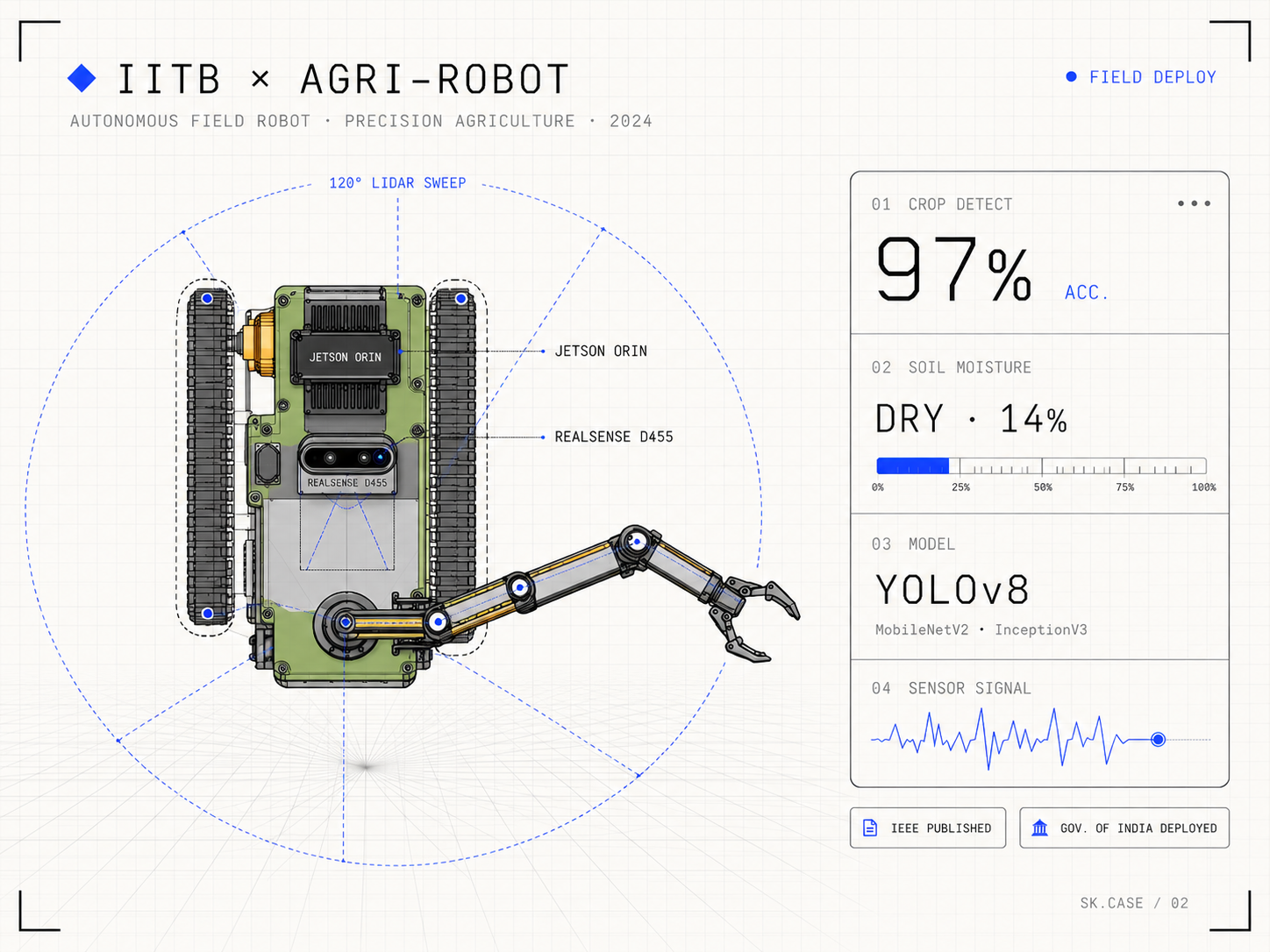
A tracked autonomous robot that sees, decides, and acts in the field — YOLOv8 on Jetson, stereo depth from Intel RealSense, IEEE-published.
97%
Crop detection
IEEE
Manuscript
5
Crops
2
Deployments
— 01 / SYSTEM ARCHITECTURE
From the sensor to the wheel.
Stereo Camera
RealSense D455
Compute
Jetson Orin Nano
Controller
Arduino UNO
Telemetry
ZigBee · 2.4GHz
Tracked Robot
Autonomous
— 02 / THE MACHINE
Four parts. One field unit.
RealSense D455
Stereo depth · RGBD input
NVIDIA Jetson Orin Nano
Onboard inference
Tracked vehicle
All-terrain field traversal
Spray arm
Targeted pesticide delivery
— 03 / WHAT IT DOES
Three jobs. One pass over the field.
Autonomous Navigation
RGBD input feeds a CNN that classifies obstacles and replans the path live.
Soil Moisture Detection
InceptionV3 / VGG-16 / MobileNetV2 classify soil moisture from visual input.
Disease + Spray
Plant-disease detection from leaf imagery, then targeted spray via the arm.
— 04 / VISION IN ACTION
YOLOv8 at the edge.
— 05 / IN THE FIELD
Shipped, not demoed.
6 mo
Build time
2
Field deployments
5
Crops supported
IEEE
Two manuscripts
"Submitted to IEEE — Vision-based autonomous tracked robot for field navigation using YOLOv8. Field datasets collected ourselves; synthetic data didn't cut it."
— 06 / BUILT WITH
The toolkit.
YOLOv8
InceptionV3
VGG-16
MobileNetV2
Intel RealSense D455
NVIDIA Jetson Orin
PyTorch
ONNX
— NEXT CASE STUDY